RoboCup-MSL

简介
RoboCup-MSL是一款轮式足球机器人,我们期望使用它实现多机器人协同足球对抗赛,它也可以作为年轻人的足球陪练伙伴。
2021年5月,我作为电控组的成员参与了 RoboCup 中型组竞赛。同时,我们赢得了中国赛的技术创新奖。2021年10月,我们参加了全国机器人锦标赛,获得国家级一等奖5项。2021年12月,我们参加了中国机器人及人工智能大赛,获得国家级一等奖1项。
作为电控组负责人,我负责研发机器人的全部电控系统,它包括:
- 设计均布式全向轮运动控制的硬件电路,通过CAN总线控制、PID算法、六轴IMU实现机器人底盘稳定运动。
- 自适应持球装置,持球时,结合地盘轮速与持球电机角度,解算持球电机的转速,以实现“车朝哪走,球向哪滚”。
- 电磁弹射系统,单板数字电路,实现对机器人击球系统的控制。
- 上下位机的通信协议
点击这里有我具体工作的介绍视频。

技术细节
下文中,我将从机械结构和硬件电控两个部分去介绍此项目的具体细节
机械部分: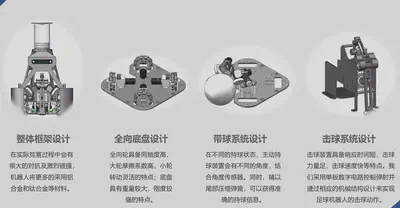
持球部分使用3508减速电机与摩擦轮作为我们的带球装置,电机与摩擦轮之间采用锥齿轮传动,两侧的主动持球装置成八字放置,持球系统侧板安装有角度传感器,检测不同的持球状态。
击球部分为了实现平射与挑射,我们采用舵机控制舵盘连接块旋转,带动一级铝柱,活动轴,二级铝柱,击球连接块,使舵机的小角度转动,实现击球杆的升降。击球模块以两块钣金作为主体结构,中间用铝柱连接,采用方形插孔的设计安装电路板与电磁弹射支架。
硬件部分: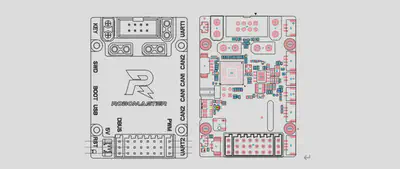
我在写核心代码时,参考了大疆 **RoboMaster2020 自组版开源步兵**,利用stm32cubemx进行基础配置,采用freertos实时操作系统进行线程管理。 系统大致分为以下几个线程: 设备校准,地盘任务,监测设备,imu任务,led闪烁,OLED显示,电池电压检测,舵机控制,持球任务,角度传感器采集任务,电磁弹射任务,以及用于通信的USB发送,接收,解包任务。
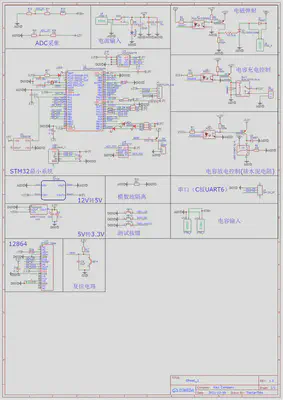
三层板设计,底部的电容版用于并联8个450V陶瓷电容,中间的主控板用于放置stm32f1,继电器,可控硅等控制部件,上层板放置升压板和水泥电阻,板层之间通过铜柱导电。
持球状态采集部分,我绘制了一块ADC采集板,它在采集到角度传感器的信息后,通过串口给C板发送角度信息。
开源&奖项
依托此平台, 我和我的团队成员斩获多枚国家级奖项, 这里是电控系统开源链接
2021RoboCup机器人世界杯中国赛技术创新奖 2021.05
第二十三届全国机器人锦标赛半自主机器人足球赛5vs5一等奖 2021.10
第二十三届全国机器人锦标赛自主导航无轨避障路径规划赛一等奖 2021.10
第二十三届中国机器人及人工智能大赛全国总决赛一等奖 2021.12
第四届全国大学生嵌入式芯片与系统设计竞赛全国总决赛三等奖 2021.11
图片

Yidan Lu(鲁一丹)
MPhil
My research interests include distributed robotics, embedded software and deep learning.