OceanTech Fish
简介
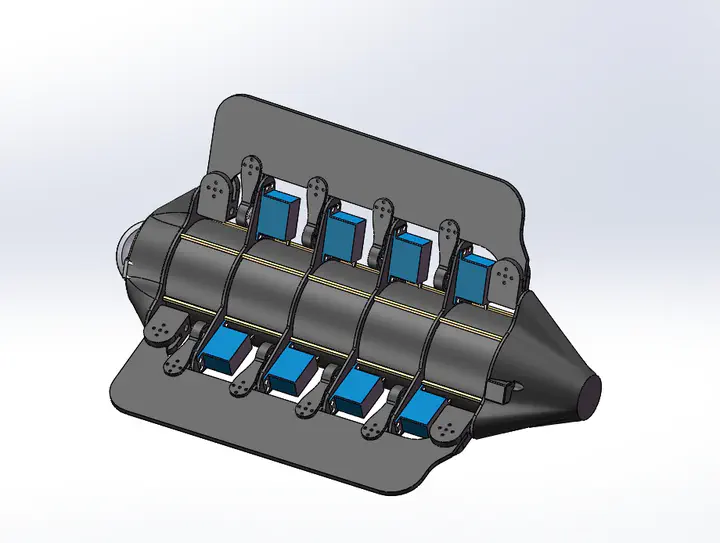
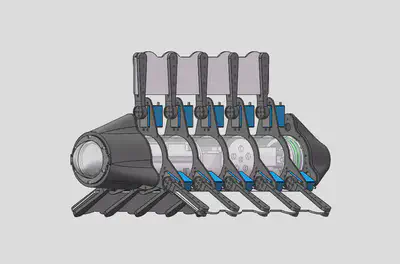
OceanTech fish是一款三波动鳍仿生鱼,我们期望它能作为水路两栖仿生机器人,应用于水文监测,管道探查等领域。
2021年5月,我作为电控组的成员参与了2021全国大学生OceanTech竞赛创新挑战赛,获得国家级二等奖1项。2021年8月,我们参加了第十届全国海洋航行器设计与制作大赛。获得国家级二等奖1项。
作为电控组成员,我主要负责波动鳍的动力学编程、以及通信模块的优化,它包括:
- 使用单独的舵机控制每个鳍条的运动,使机器人的鳍片产生不同的波形、以实现不同的运动姿态。
- 保证摄像头采集到的数据可以有效传输给客户端。
点击这里有我们早期演示的视频。

技术细节
驱动方案: 使用STM32H7芯片,通过算法使STM32H7芯片在接收到九轴传感器数据后、对水下机器人进行运动学正解解算与分析,使用RS232协议将期望轨迹发送给舵机PWM信号发生板,最后PWM信号发生板通过改变占空比使舵机以规定速度拉动刚性鳍条运动,从而使鳍面成为预期形状并产生稳定推力;
姿态控制: 通过改变机器人内部丝杆滑块位置实现自稳定。舵机内控制板通过编码器对舵机进行调整,以实现整个系统的闭环控制。
数据传输: 基于5.8G的无线电信号被我们用作图传与远程通讯用途,我们能以此远程得到无人机正前方视场角130°的图像、通过传回数据对水下无人机进行远程参数调整与控制。
舵机simulink仿真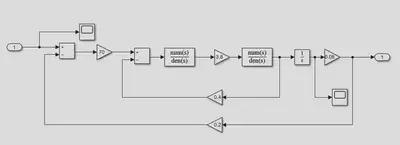
CFD方法-波动鳍周围速度场模拟仿真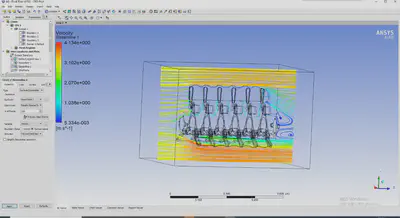
手机客户端

奖项
依托此平台,我与我的团队成员斩获国家级二等奖两项
2021全国大学生OceanTech竞赛创新挑战赛二等奖 2021.05
第十届全国海洋航行器设计与制作大赛《三波动鳍两栖仿生航行器》二等奖 2021.08
图片
Yidan Lu(鲁一丹)
MPhil
My research interests include distributed robotics, embedded software and deep learning.