Learning Quadrupedal Locomotion over Challenging Terrain
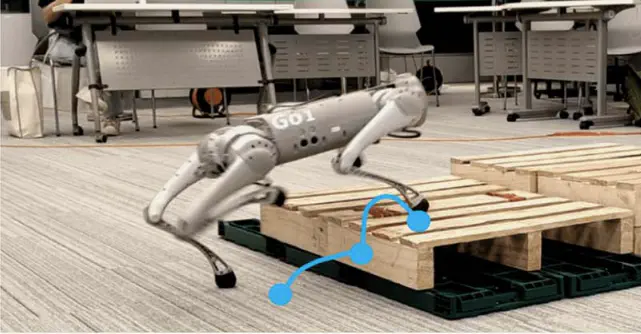 Image credit: Unsplash
Image credit: UnsplashMorAL: Learning Morphologically Adaptive Locomotion Controller for Quadrupedal Robots on Challenging Terrains
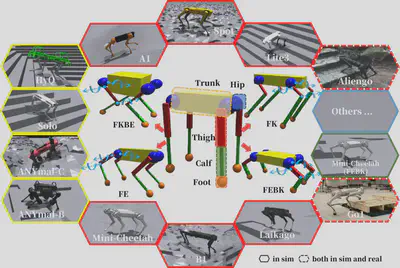
abtract MorAL is a learning-based control framework adaptive to various quadruped robot morphologies and challenging terrains. It trains a control policy and an adaptive module simultaneously, considering the robot’s temporal states. This adaptive module allows the control policy to identify different robots’ properties and estimate body velocity online. Extensive real-world and simulation tests show that MorAL enables robots with diverse morphologies to navigate various harsh indoor and outdoor terrains effectively.
Yidan Lu(鲁一丹)
MPhil
My research interests include distributed robotics, embedded software and deep learning.